Definición completa de Robot e Robótica. Explica os termos reprogramable e multifuncional aplicados a un robot.
En 1979, o "Robot Institute of America" define un robot como: "Un manipulador reprogramável, multifuncional deseñado para mover materiais, pezas, ferramentas ou Equipos específicos a través dunha serie de movementos programados para realización unha variedade de tarefas ". Os robots son capaces de realizar tarefas repetitivas así máis rápido, máis barato e máis preciso que o ser humano. Dise que un robot ten intelixencia Artificial (IA), porque ten a capacidade de obter información e do seu contorno Baseado nesta acción. É considerado un robot autónomo como un axente intelixente cando se atende aos seguintes requisitos: - Autonomía: O sistema de navegación é a propia máquina que debe funcionar sen conexión física a un equipo externo. - Intelixencia: O robot ten capacidade de razoar, a punto de poder tomar as súas propias decisións e para seleccionar, fundir e integrar as súas medidas sensores. Poderiamos abordar unha definición de Robótica como: deseño, fabricación e uso de máquinas automáticas programables, a fin de realizar tarefas repetitivas, como coches, aparellos de montaxe, etc. e outros actividades. Segundo Isaac Asimmov, Robótica tecnoloxía aplícase aos robots.
Características dos robots.
Os robots poden ser de diferentes modelos , así como programas , todo depende a función que han exercer. Se sabe cales son as diferentes características eles posúan , entre os que están : - A precisión cando realizan unha acción ou movemento. - A capacidade de carga en quilogramos que o robot pode manipular. - O grao de liberdade que teñen cos seus movementos. Normalmente non coincidir co Está a ter as articulacións do robot. - O sistema de coordenadas que especifica que aborda realizar a súa movementos e posicións. Estes poden ser coordenadas cartesianas ( X , y ), cilíndrico , etc.
Tipos de robots según o sistema de coordenadas. Captura de pantalla os debuxos de sistemas de coordenadas e os pegas en Open Office Draw, os recortas e engades os textos correspondentes co cadro de textos que aparece no cadro de ferramentas da parte inferior da pantalla. Unha vez rematado exportas o arquivo en formato .PNG e o insertas como imaxe no teu blog

Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
O sensor traduce a información que ven en ti do lado de fóra por impulso eléctrica , tipicamente dixitais (ou deixar pasar corrente ), que pode ser analizado e procesados pola unidade de control do sistema. Unha variedade de sensores , entre eles podemos citar:
- Sensores de temperatura:
Un exemplo son os termistores : estas resistencias cuxo valor aumenta con temperatura ( PTC ) ou diminúe coa temperatura ( NTC ). Polo tanto, a temperatura depende do termistor para permitir ou non o paso do actual polo sistema de circuíto de control. O símbolo e a apariencia dun termistor é:


- Sensores de posición:
Entre outros, temos:
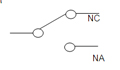
-Chaves fin de curso: Trátase dun interruptor que consta dunha pequena parte móbil e dunha peza fixa chamada NA , normalmente aberto, ou NC, normalmente pechado.
-Magnéticos:
Detectar campos magnéticos que causan ou imáns correntes eléctricas. O principal deles chámase chave Reed ; consiste nun par tira de metal de materiais ferromagnéticos dobrado dentro dun cápsula están unidas en presenza dun campo magnético , pechando o circuíto. O interruptor de lamas pode substituír claves fin de curso para detectar posición dun elemento móbil, coa vantaxe de que non necesita de ser empurrado fisicamente por el dixo que pode detectar o contacto de proximidade directo.

-Ópticos:
Detectar a presenza dunha persoa ou dun obxecto que nterrumpen o feixe de luz que atinxe o sensor. Os principais sensores ópticos son fotorresistências , LDR .


-Sensores de humidade:
Baséanse en auga non é un material illante así como o aire , pero ten un condutividade eléctrica. Así, un par de fíos eléctricos desencapados ( sen cinta revestimento illante eles ) vai levar unha pequena cantidade de corrente se o ambiente é mollada ; se colocarmos un transistor na rexión activa que amplifica esa corrente ten un Detector de humidade.

-Sensores de son:
A través dunha difragma que o movemento por ondas sonoras, unha placa en movemento refrixerante por medio de diferentes capacidades.

Clasificación xeral. En cada apartado inclue unha imaxe.
Desde unha visión moi xeral os robots poden ser dos seguintes tipos:
Androides:
Os androides son dispositivos que se parecen e actúan como seres humanos. Robots hoxe veñen en todas as formas e tamaños , pero , excepto para os bots aparecendo en exposicións e concertos , non se parecen con xente e non son , polo tanto, andróides . Actualmente, Androids reais existen só na imaxinación e na películas de ficción.

Móbiles:
Os robots móbiles están equipados con pernas, rodas ou orugas que lles permitan mover segundo a súa programación. Producir a información que reciben a través seus propios sensores e sistemas son utilizados en certos tipos de instalacións industrial , especialmente para o transporte de mercadorías nas cadeas de abastecemento tendas. Robots deste tipo tamén son usadas para investigación en lugares inaccesible ou distantes, como a explotación do espazo e investigacións ou rescates submarinos.

Industriais:
Os robots industriais son dispositivos mecánicos e electrónicos destinados a realizar automaticamente (sen intervención humana) ou certos procesos de fabricación manipulación. Os robots industriais, na actualidade, son de lonxe o máis frecuentemente atopados. O Xapón e os Estados Unidos lideran a produción eo consumo de Xapón robots industriais ser o número un. Robots industriais xorden da necesidade de: - Fabricación productos economicamente. - Os produtos son de calidade. - Iso mesmo produto que pode escoller moitas opcións. Como exemplo, pense en un coche do mesmo modelo, pode escoller a cor, número de portas, tipo de pneumáticos, con ou sen o alerón e todas as opcións de acabado interior. A fábrica de automóbiles, que constrúe mil por día coches, cada un co seu opcións, ten que usar robots para que se poidan comprar o coche un prezo accesible e nós garante o seu funcionamento.

Robots para próteses médicas:
Son as próteses robóticas e recentes robots de asistencia cirúrxicas (como robot da Vinci cirurxián).


Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
O sensor traduce a información que ven en ti do lado de fóra por impulso eléctrica , tipicamente dixitais (ou deixar pasar corrente ), que pode ser analizado e procesados pola unidade de control do sistema. Unha variedade de sensores , entre eles podemos citar:
- Sensores de temperatura:
Un exemplo son os termistores : estas resistencias cuxo valor aumenta con temperatura ( PTC ) ou diminúe coa temperatura ( NTC ). Polo tanto, a temperatura depende do termistor para permitir ou non o paso do actual polo sistema de circuíto de control. O símbolo e a apariencia dun termistor é:
- Sensores de posición:
Entre outros, temos:
-Chaves fin de curso: Trátase dun interruptor que consta dunha pequena parte móbil e dunha peza fixa chamada NA , normalmente aberto, ou NC, normalmente pechado.
-Magnéticos:
Detectar campos magnéticos que causan ou imáns correntes eléctricas. O principal deles chámase chave Reed ; consiste nun par tira de metal de materiais ferromagnéticos dobrado dentro dun cápsula están unidas en presenza dun campo magnético , pechando o circuíto. O interruptor de lamas pode substituír claves fin de curso para detectar posición dun elemento móbil, coa vantaxe de que non necesita de ser empurrado fisicamente por el dixo que pode detectar o contacto de proximidade directo.
-Ópticos:
Detectar a presenza dunha persoa ou dun obxecto que nterrumpen o feixe de luz que atinxe o sensor. Os principais sensores ópticos son fotorresistências , LDR .
-Sensores de humidade:
Baséanse en auga non é un material illante así como o aire , pero ten un condutividade eléctrica. Así, un par de fíos eléctricos desencapados ( sen cinta revestimento illante eles ) vai levar unha pequena cantidade de corrente se o ambiente é mollada ; se colocarmos un transistor na rexión activa que amplifica esa corrente ten un Detector de humidade.
-Sensores de son:
A través dunha difragma que o movemento por ondas sonoras, unha placa en movemento refrixerante por medio de diferentes capacidades.
Clasificación xeral. En cada apartado inclue unha imaxe.
Desde unha visión moi xeral os robots poden ser dos seguintes tipos:
Androides:
Os androides son dispositivos que se parecen e actúan como seres humanos. Robots hoxe veñen en todas as formas e tamaños , pero , excepto para os bots aparecendo en exposicións e concertos , non se parecen con xente e non son , polo tanto, andróides . Actualmente, Androids reais existen só na imaxinación e na películas de ficción.
Móbiles:
Os robots móbiles están equipados con pernas, rodas ou orugas que lles permitan mover segundo a súa programación. Producir a información que reciben a través seus propios sensores e sistemas son utilizados en certos tipos de instalacións industrial , especialmente para o transporte de mercadorías nas cadeas de abastecemento tendas. Robots deste tipo tamén son usadas para investigación en lugares inaccesible ou distantes, como a explotación do espazo e investigacións ou rescates submarinos.
Industriais:
Os robots industriais son dispositivos mecánicos e electrónicos destinados a realizar automaticamente (sen intervención humana) ou certos procesos de fabricación manipulación. Os robots industriais, na actualidade, son de lonxe o máis frecuentemente atopados. O Xapón e os Estados Unidos lideran a produción eo consumo de Xapón robots industriais ser o número un. Robots industriais xorden da necesidade de: - Fabricación productos economicamente. - Os produtos son de calidade. - Iso mesmo produto que pode escoller moitas opcións. Como exemplo, pense en un coche do mesmo modelo, pode escoller a cor, número de portas, tipo de pneumáticos, con ou sen o alerón e todas as opcións de acabado interior. A fábrica de automóbiles, que constrúe mil por día coches, cada un co seu opcións, ten que usar robots para que se poidan comprar o coche un prezo accesible e nós garante o seu funcionamento.
Robots para próteses médicas:
Son as próteses robóticas e recentes robots de asistencia cirúrxicas (como robot da Vinci cirurxián).
No hay comentarios:
Publicar un comentario