Nesta ligazón atoparás un documento elaborada pola Universidade de Oviedo. A información que necesitas está nas 9 primeiras páxinas do documento.
Cos contidos que se enumeran a continuación crea unha entrada nova no teu blog co nome de Tema 1 Sociedade do Coñecemento: NANOTECNOLOXÍA
Definición de Nanotecnoloxía, incluindo a definición de nanómetro.
A nanotecnoloxía non é unha tecnoloxía específica; nin sequera un grupo de tecnoloxías ben definidas.
A nanotecnoloxía é máis ben un campo moi amplo e heteroxéneo de tecnoloxía no que se diseñan, caracterizan, producen e aplican estruturas, compoñentes e sistemas, mantendo un control sobre o tamaño e forma dos seus elementos constituíntes (átomos, moléculas ou macromoléculas) a nivel da escala dos nanómetros, de xeito que ditas estruturas, compoñentes ou sistemas posúen polo menos unha propiedade característica nova ou mellorada debido ao pequeno tamaño dos seus constituíntes.
A nanotecnoloxía utiliza unha ampla gama de disciplinas científico-técnicas co fin de estudar materiais, partículas e estruturas que implican a creación ou presenza de elementos que teñen polo menos unha dimensión espacial inferior aos 100nm, sendo un nanómetro a millonésima parte dun milímetro.
Nanoelectrónica: a qué dará lugar? Relación coa tecnoloxía Informática.
A nanoelectrónica dará lugar a sistemas
de almacenamento de datos de alta densidade re
Gistro (por exemplo, 1 Terabit / polgada 2 ) plásticos e novas tecnoloxías de visualización baseados
flexible. A longo prazo, o desenvolvemento da nanoelectrónica moleculares ou biomoleculares , espintrónica
e computación cuántica podería abrir novos camiños para alén da tecnoloxía do ordenador actual. nanoelectrónica
estará na orixe dunha nova xeración de ordenadores, teléfonos , coches , electrodomésticos
ticos e equipos de sistema de automatización necesaria en calquera aplicación industrial ou
doméstica.
Nanobiotecnoloxía: qué disciplinas combina? Aplicacións en Medicina.
No caso da nanobiotecnoloxía, estase a combinar a enxeñería a nivel molecular coa bioloxía, ben manipulando directamente os sistemas vivos, ou creando biochips como os que xa están sendo producidos actualmente inspirados en materiais biolóxicos. Nun futuro próximo, a nanotecnoloxía proveranos con novas innovacións extraordinarias no campo da medicina, por exemplo, con
novos diagnósticos miniaturizados que poderían
implantadas para a detección precoz da enfermidade
lazos, revestimentos e nanocompostos menos desenvolvidos ante a utilización de nanotecnoloxía, non só en
produción, pero nos conceptos de deseño de materiais
seus compoñentes que melloran a bioatividade e biocompatível
bilidade dos implantes, novas matrices de apoio capaz
auto estruturado que está facilitando o desenvolvemento de
unha nova xeración de materiais no campo da
enxeñaría de tecidos e materiais biomiméticos, abrindo a
posibilidade, a longo prazo, para obter a síntese de órganos
substitución. Eles están a desenvolver novos sistemas
obxecto de entrega de drogas e recentemente logrou traer e presentar nano
partículas en células tumorais para o tratamento, por exemplo, por calor.
Aplicacións á produción e almacenamento de enerxía.
Tamén o campo da produción e almacenamento de enerxía poderá beneficiarse ,por exemplo,
de
novos desenvolvementos en células de combustible ou de sólidos lixeiros nanoestruturados que teñen o potencial para unalmacenamento de hidróxeno. Tamén estanse a desenvolver células solares fotovoltaicas eficaces e de baixo custo (por exemplo, " pintura solar "). Os adiantos no campo das nanotecnoloxías tamén permitirán o aforro de enerxía a través dun mellor illamento,
do transporte e dunha iluminación máis eficaz.
Avances en Ciencias de Materiais.
Os avances na ciencia dos materiais a través do uso da nanotecnoloxía son de gran
ámbito e o impacto sentirase en case todos os sectores. Nanopartículas xa son utilizados
para reforzo de materiais ou funcionalizar de cosméticos. Recórrese á utilización de nanoestruturas superficiais para superficies resistentes relado , auga - repelente , limpas ou estériles. Enxerto selectiva de
moléculas orgánicas a través da nanoestruturación superficial vai avanzar fabricación
biosensores e electrónica molecular. Ademais , pode mellorar e avanzar produce moito dos materiais en condicións extremas , con consecuente
aplicacións nas industrias aeronáutica e espacial.
Fabricación a nivel nanométrico.
Fabricación a escala nanométrica esixe unha nova visión interdisciplinar , tanto a investigación
e procesos de fabricación. Conceptualmente , hai dúas vías principais : a primeira
é a miniaturización de visión microssistemas chamado " top-down " ou " top-
down " ea segunda imita a natureza a través da construción de estruturas de niveis
visión atómica e molecular chamado "bottom -up " ou "bottom -up ". A primeira podería ser descrito como un proceso de montaxe, o segundo como un proceso de síntese. A visión de abaixo a arriba estase a desenvolver en etapas iniciais de desenvolvemento , pero o seu impacto potencial é de gran alcance e podería
cambiar rutas de produción actuais.
A instrumentación para o estudo das propiedades da materia na escala nanométrica xa está a ter un importante impacto directo e indirecto que está a estimular
progreso nunha ampla gama de sectores. Os instrumentos desempeñan tamén un papel fundamental
no desenvolvemento de procesos de fabricación con base en técnicas convencionais con enorme potencial
novas técnicas , como deposición por plasma de recubrimentos nanoestruturadaos a partir da inxección directa de precursores líquidos, ou a utilización dun plasma de alta
enerxía na fabricación de nanopartículas ou funcionalidade de superficies.
Beneficios para a investigación sobre alimentos, auga e medio ambiente.
A investigación sobre alimentos, auga e medio ambiente tamén pode beneficiarse das
nanotecnoloxías con, por exemplo, o desenvolvemento de ferramentas para a detección e neutralización da presenza de microorganismos ou pesticidas. A través de novas técnicas de etiquetaxe nanoetiquetado miniaturizado podería realizarse o seguimento desde a orixe dos alimentos importados. O desenvolvemento de métodos
baseada no uso de nanotecnoloxía (por exemplo, técnicas foto-catalítica) permiten a arranxar e limpar o efecto da contaminación e outros danos medioambientais (por exemplo, contaminación
nación por petróleo en auga ou do chan).
Contribución á seguridade.
A contribución á seguridade se pode realizar a través de, por exemplo, novos sistemas de detección de alta especificidade de alerta precoz contra axentes biolóxicos ou químicos, ata o nivel
molecular. O nanoetiquetado das notas podería contribuír á protección de propiedades. Tamén está en marcha o desenvolvemento de novas técnicas criptográicas para a comunicación de datos.
Exemplos de produtos comercializados actualmente desenrolados a través de nanotecnoloxías.
Xa comercializados varios produtos desenvolvidos a través da nanotecnoloxía. É
produtos sanitarios ( ligaduras , válvulas cardíacas , etc), compoñentes electrónicos, pintura resistente
a relado, equipos de deportes, engurras e tecidos resistentes Mancha e loções solares. Analistas estiman
o mercado para estes produtos sexa actualmente de preto de 2.500 millóns de euros,
pero pode aumentar a centos de miles de millóns de euros para 2010 e unha descarga millóns
tras esa data.
jueves, 29 de octubre de 2015
jueves, 22 de octubre de 2015
ROBÓTICA
Nesta ligazón atoparás a unha unidade didáctica elaborada polo profesor José Antonio Chaves. Cos contidos que se enumeran a continuación crea unha entrada nova no teu blog co nome de Tema 1 Sociedade do Coñecemento: ROBOTICA.
Definición completa de Robot e Robótica. Explica os termos reprogramable e multifuncional aplicados a un robot.
En 1979, o "Robot Institute of America" define un robot como: "Un manipulador reprogramável, multifuncional deseñado para mover materiais, pezas, ferramentas ou Equipos específicos a través dunha serie de movementos programados para realización unha variedade de tarefas ". Os robots son capaces de realizar tarefas repetitivas así máis rápido, máis barato e máis preciso que o ser humano. Dise que un robot ten intelixencia Artificial (IA), porque ten a capacidade de obter información e do seu contorno Baseado nesta acción. É considerado un robot autónomo como un axente intelixente cando se atende aos seguintes requisitos: - Autonomía: O sistema de navegación é a propia máquina que debe funcionar sen conexión física a un equipo externo. - Intelixencia: O robot ten capacidade de razoar, a punto de poder tomar as súas propias decisións e para seleccionar, fundir e integrar as súas medidas sensores. Poderiamos abordar unha definición de Robótica como: deseño, fabricación e uso de máquinas automáticas programables, a fin de realizar tarefas repetitivas, como coches, aparellos de montaxe, etc. e outros actividades. Segundo Isaac Asimmov, Robótica tecnoloxía aplícase aos robots.
Características dos robots.
Os robots poden ser de diferentes modelos , así como programas , todo depende a función que han exercer. Se sabe cales son as diferentes características eles posúan , entre os que están : - A precisión cando realizan unha acción ou movemento. - A capacidade de carga en quilogramos que o robot pode manipular. - O grao de liberdade que teñen cos seus movementos. Normalmente non coincidir co Está a ter as articulacións do robot. - O sistema de coordenadas que especifica que aborda realizar a súa movementos e posicións. Estes poden ser coordenadas cartesianas ( X , y ), cilíndrico , etc.
Definición completa de Robot e Robótica. Explica os termos reprogramable e multifuncional aplicados a un robot.
En 1979, o "Robot Institute of America" define un robot como: "Un manipulador reprogramável, multifuncional deseñado para mover materiais, pezas, ferramentas ou Equipos específicos a través dunha serie de movementos programados para realización unha variedade de tarefas ". Os robots son capaces de realizar tarefas repetitivas así máis rápido, máis barato e máis preciso que o ser humano. Dise que un robot ten intelixencia Artificial (IA), porque ten a capacidade de obter información e do seu contorno Baseado nesta acción. É considerado un robot autónomo como un axente intelixente cando se atende aos seguintes requisitos: - Autonomía: O sistema de navegación é a propia máquina que debe funcionar sen conexión física a un equipo externo. - Intelixencia: O robot ten capacidade de razoar, a punto de poder tomar as súas propias decisións e para seleccionar, fundir e integrar as súas medidas sensores. Poderiamos abordar unha definición de Robótica como: deseño, fabricación e uso de máquinas automáticas programables, a fin de realizar tarefas repetitivas, como coches, aparellos de montaxe, etc. e outros actividades. Segundo Isaac Asimmov, Robótica tecnoloxía aplícase aos robots.
Características dos robots.
Os robots poden ser de diferentes modelos , así como programas , todo depende a función que han exercer. Se sabe cales son as diferentes características eles posúan , entre os que están : - A precisión cando realizan unha acción ou movemento. - A capacidade de carga en quilogramos que o robot pode manipular. - O grao de liberdade que teñen cos seus movementos. Normalmente non coincidir co Está a ter as articulacións do robot. - O sistema de coordenadas que especifica que aborda realizar a súa movementos e posicións. Estes poden ser coordenadas cartesianas ( X , y ), cilíndrico , etc.
Tipos de robots según o sistema de coordenadas. Captura de pantalla os debuxos de sistemas de coordenadas e os pegas en Open Office Draw, os recortas e engades os textos correspondentes co cadro de textos que aparece no cadro de ferramentas da parte inferior da pantalla. Unha vez rematado exportas o arquivo en formato .PNG e o insertas como imaxe no teu blog

Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
O sensor traduce a información que ven en ti do lado de fóra por impulso eléctrica , tipicamente dixitais (ou deixar pasar corrente ), que pode ser analizado e procesados pola unidade de control do sistema. Unha variedade de sensores , entre eles podemos citar:
- Sensores de temperatura:
Un exemplo son os termistores : estas resistencias cuxo valor aumenta con temperatura ( PTC ) ou diminúe coa temperatura ( NTC ). Polo tanto, a temperatura depende do termistor para permitir ou non o paso do actual polo sistema de circuíto de control. O símbolo e a apariencia dun termistor é:


- Sensores de posición:
Entre outros, temos:
-Chaves fin de curso: Trátase dun interruptor que consta dunha pequena parte móbil e dunha peza fixa chamada NA , normalmente aberto, ou NC, normalmente pechado.
-Magnéticos:
Detectar campos magnéticos que causan ou imáns correntes eléctricas. O principal deles chámase chave Reed ; consiste nun par tira de metal de materiais ferromagnéticos dobrado dentro dun cápsula están unidas en presenza dun campo magnético , pechando o circuíto. O interruptor de lamas pode substituír claves fin de curso para detectar posición dun elemento móbil, coa vantaxe de que non necesita de ser empurrado fisicamente por el dixo que pode detectar o contacto de proximidade directo.

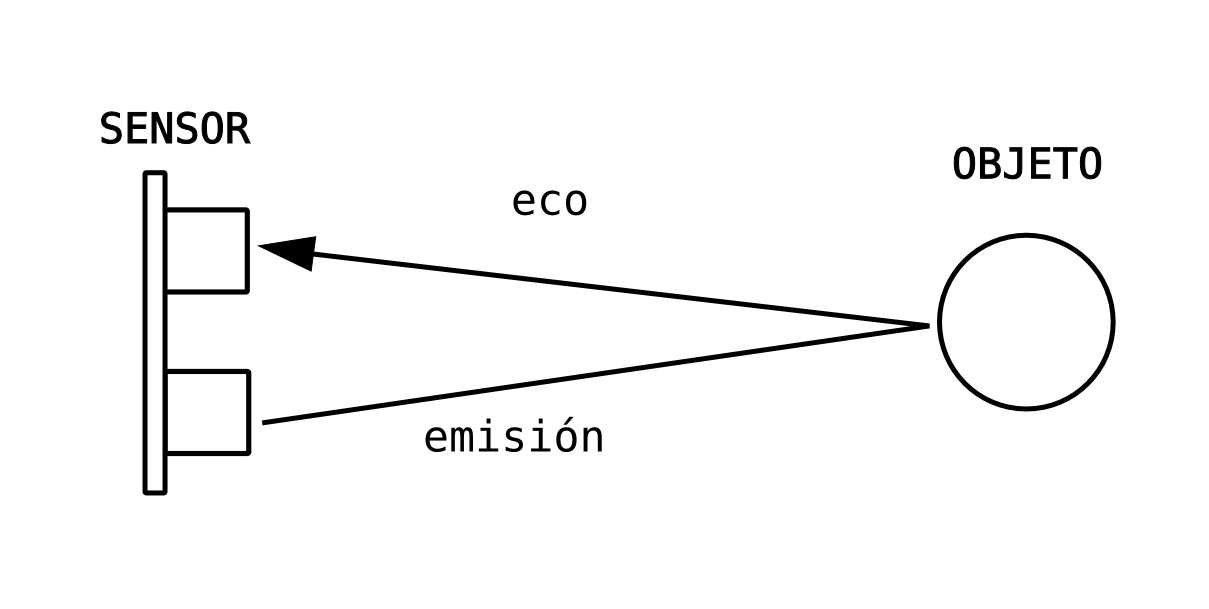
-Ópticos:
Detectar a presenza dunha persoa ou dun obxecto que nterrumpen o feixe de luz que atinxe o sensor. Os principais sensores ópticos son fotorresistências , LDR .


-Sensores de humidade:
Baséanse en auga non é un material illante así como o aire , pero ten un condutividade eléctrica. Así, un par de fíos eléctricos desencapados ( sen cinta revestimento illante eles ) vai levar unha pequena cantidade de corrente se o ambiente é mollada ; se colocarmos un transistor na rexión activa que amplifica esa corrente ten un Detector de humidade.

-Sensores de son:
A través dunha difragma que o movemento por ondas sonoras, unha placa en movemento refrixerante por medio de diferentes capacidades.

Clasificación xeral. En cada apartado inclue unha imaxe.
Desde unha visión moi xeral os robots poden ser dos seguintes tipos:
Androides:
Os androides son dispositivos que se parecen e actúan como seres humanos. Robots hoxe veñen en todas as formas e tamaños , pero , excepto para os bots aparecendo en exposicións e concertos , non se parecen con xente e non son , polo tanto, andróides . Actualmente, Androids reais existen só na imaxinación e na películas de ficción.

Móbiles:
Os robots móbiles están equipados con pernas, rodas ou orugas que lles permitan mover segundo a súa programación. Producir a información que reciben a través seus propios sensores e sistemas son utilizados en certos tipos de instalacións industrial , especialmente para o transporte de mercadorías nas cadeas de abastecemento tendas. Robots deste tipo tamén son usadas para investigación en lugares inaccesible ou distantes, como a explotación do espazo e investigacións ou rescates submarinos.

Industriais:
Os robots industriais son dispositivos mecánicos e electrónicos destinados a realizar automaticamente (sen intervención humana) ou certos procesos de fabricación manipulación. Os robots industriais, na actualidade, son de lonxe o máis frecuentemente atopados. O Xapón e os Estados Unidos lideran a produción eo consumo de Xapón robots industriais ser o número un. Robots industriais xorden da necesidade de: - Fabricación productos economicamente. - Os produtos son de calidade. - Iso mesmo produto que pode escoller moitas opcións. Como exemplo, pense en un coche do mesmo modelo, pode escoller a cor, número de portas, tipo de pneumáticos, con ou sen o alerón e todas as opcións de acabado interior. A fábrica de automóbiles, que constrúe mil por día coches, cada un co seu opcións, ten que usar robots para que se poidan comprar o coche un prezo accesible e nós garante o seu funcionamento.

Robots para próteses médicas:
Son as próteses robóticas e recentes robots de asistencia cirúrxicas (como robot da Vinci cirurxián).


Tipos de sensores empregados nos robots. En cada apartado inclue unha imaxe.
O sensor traduce a información que ven en ti do lado de fóra por impulso eléctrica , tipicamente dixitais (ou deixar pasar corrente ), que pode ser analizado e procesados pola unidade de control do sistema. Unha variedade de sensores , entre eles podemos citar:
- Sensores de temperatura:
Un exemplo son os termistores : estas resistencias cuxo valor aumenta con temperatura ( PTC ) ou diminúe coa temperatura ( NTC ). Polo tanto, a temperatura depende do termistor para permitir ou non o paso do actual polo sistema de circuíto de control. O símbolo e a apariencia dun termistor é:
- Sensores de posición:
Entre outros, temos:
-Chaves fin de curso: Trátase dun interruptor que consta dunha pequena parte móbil e dunha peza fixa chamada NA , normalmente aberto, ou NC, normalmente pechado.
-Magnéticos:
Detectar campos magnéticos que causan ou imáns correntes eléctricas. O principal deles chámase chave Reed ; consiste nun par tira de metal de materiais ferromagnéticos dobrado dentro dun cápsula están unidas en presenza dun campo magnético , pechando o circuíto. O interruptor de lamas pode substituír claves fin de curso para detectar posición dun elemento móbil, coa vantaxe de que non necesita de ser empurrado fisicamente por el dixo que pode detectar o contacto de proximidade directo.
-Ópticos:
Detectar a presenza dunha persoa ou dun obxecto que nterrumpen o feixe de luz que atinxe o sensor. Os principais sensores ópticos son fotorresistências , LDR .
-Sensores de humidade:
Baséanse en auga non é un material illante así como o aire , pero ten un condutividade eléctrica. Así, un par de fíos eléctricos desencapados ( sen cinta revestimento illante eles ) vai levar unha pequena cantidade de corrente se o ambiente é mollada ; se colocarmos un transistor na rexión activa que amplifica esa corrente ten un Detector de humidade.
-Sensores de son:
A través dunha difragma que o movemento por ondas sonoras, unha placa en movemento refrixerante por medio de diferentes capacidades.
Clasificación xeral. En cada apartado inclue unha imaxe.
Desde unha visión moi xeral os robots poden ser dos seguintes tipos:
Androides:
Os androides son dispositivos que se parecen e actúan como seres humanos. Robots hoxe veñen en todas as formas e tamaños , pero , excepto para os bots aparecendo en exposicións e concertos , non se parecen con xente e non son , polo tanto, andróides . Actualmente, Androids reais existen só na imaxinación e na películas de ficción.
Móbiles:
Os robots móbiles están equipados con pernas, rodas ou orugas que lles permitan mover segundo a súa programación. Producir a información que reciben a través seus propios sensores e sistemas son utilizados en certos tipos de instalacións industrial , especialmente para o transporte de mercadorías nas cadeas de abastecemento tendas. Robots deste tipo tamén son usadas para investigación en lugares inaccesible ou distantes, como a explotación do espazo e investigacións ou rescates submarinos.
Industriais:
Os robots industriais son dispositivos mecánicos e electrónicos destinados a realizar automaticamente (sen intervención humana) ou certos procesos de fabricación manipulación. Os robots industriais, na actualidade, son de lonxe o máis frecuentemente atopados. O Xapón e os Estados Unidos lideran a produción eo consumo de Xapón robots industriais ser o número un. Robots industriais xorden da necesidade de: - Fabricación productos economicamente. - Os produtos son de calidade. - Iso mesmo produto que pode escoller moitas opcións. Como exemplo, pense en un coche do mesmo modelo, pode escoller a cor, número de portas, tipo de pneumáticos, con ou sen o alerón e todas as opcións de acabado interior. A fábrica de automóbiles, que constrúe mil por día coches, cada un co seu opcións, ten que usar robots para que se poidan comprar o coche un prezo accesible e nós garante o seu funcionamento.
Robots para próteses médicas:
Son as próteses robóticas e recentes robots de asistencia cirúrxicas (como robot da Vinci cirurxián).
jueves, 15 de octubre de 2015
DOMÓTICA
Nesta ligazón atoparás a Guía Técnica BT51, elaborada polo Ministerio de Industria, para as instalacións de sistemas de automatización, xestión técnica da enerxía e seguridade para vivendas e edificios.
Cos contidos que se enumeran a continuación crea unha entrada nova no teu blog co nome de Tema 1 Sociedade do Coñecemento: DOMOTICA.
- Campo de aplicación.
- Fines principais dos sistemas domóticos.
- Define os 3 sistemas denominados como domóticos.
- Pon exemplos de nodo, actuadores e dispositivos de entrada.
- Fai a táboa cos dispositivos dunha vivenda con grao de automatización normal, indicando funcionalidade e aplicación de cada un.

martes, 6 de octubre de 2015
TEMA 1 SOCIEDADE DO COÑECEMENTO
ACITIVIDADE 1
ACITIVIDADE 2
Táboa en formato libre que incluia todos os conceptos da táboa 1 da páxina 13 do libro e unha imaxe de cada un deles. Os textos deben ser o do libro (non é necesario engadir nada).
ACTIVIDADE 3.pdf
Desenrola os seguintes conceptos da páxina 15 do libro mediante parágrafos de 15 liñas aproximadamente e letra de tamaño 12, ampliando a información do libro:
ACTIVIDADE4.pdf
Desenrola os seguintes conceptos da páxina 15 ca información do libro (non é necesario engadir nada máis) e busca 2 imaxes para ilustrar cada concepto. Compón un documento de 2 ou 3 páxinas.
Crea unha táboa de 5x2. Na columna da esquerda irán os textos
correspondentes os conceptos indicados mais abaixo (aprox 12 liñas en
tamaño de letra 12). Na columna da dereita irán imaxes relacionadas
descargadas de Internet nun tamaño proporcionado ó texto (o mesmo tamaño
para todas as imaxes). Os conceptos (están definidos na pax 11 do libro
e se trata de engadir información ata completar as 12 liñas necesarias)
son os seguintes:
- Sociedade de información.
- Sociedade do coñecemento.
- Brecha dixital.
- Alfabetización dixital.
- Adición as novas tecnoloxías.
ACITIVIDADE 2
Táboa en formato libre que incluia todos os conceptos da táboa 1 da páxina 13 do libro e unha imaxe de cada un deles. Os textos deben ser o do libro (non é necesario engadir nada).
ACTIVIDADE 3.pdf
Desenrola os seguintes conceptos da páxina 15 do libro mediante parágrafos de 15 liñas aproximadamente e letra de tamaño 12, ampliando a información do libro:
- eAdministración.
- Teletrabajo.
- Gestión de tráfico.
- eSalud.
ACTIVIDADE4.pdf
Desenrola os seguintes conceptos da páxina 15 ca información do libro (non é necesario engadir nada máis) e busca 2 imaxes para ilustrar cada concepto. Compón un documento de 2 ou 3 páxinas.
- DNIe.
- Certificado dixital.
Suscribirse a:
Comentarios (Atom)